Autonomous Driving
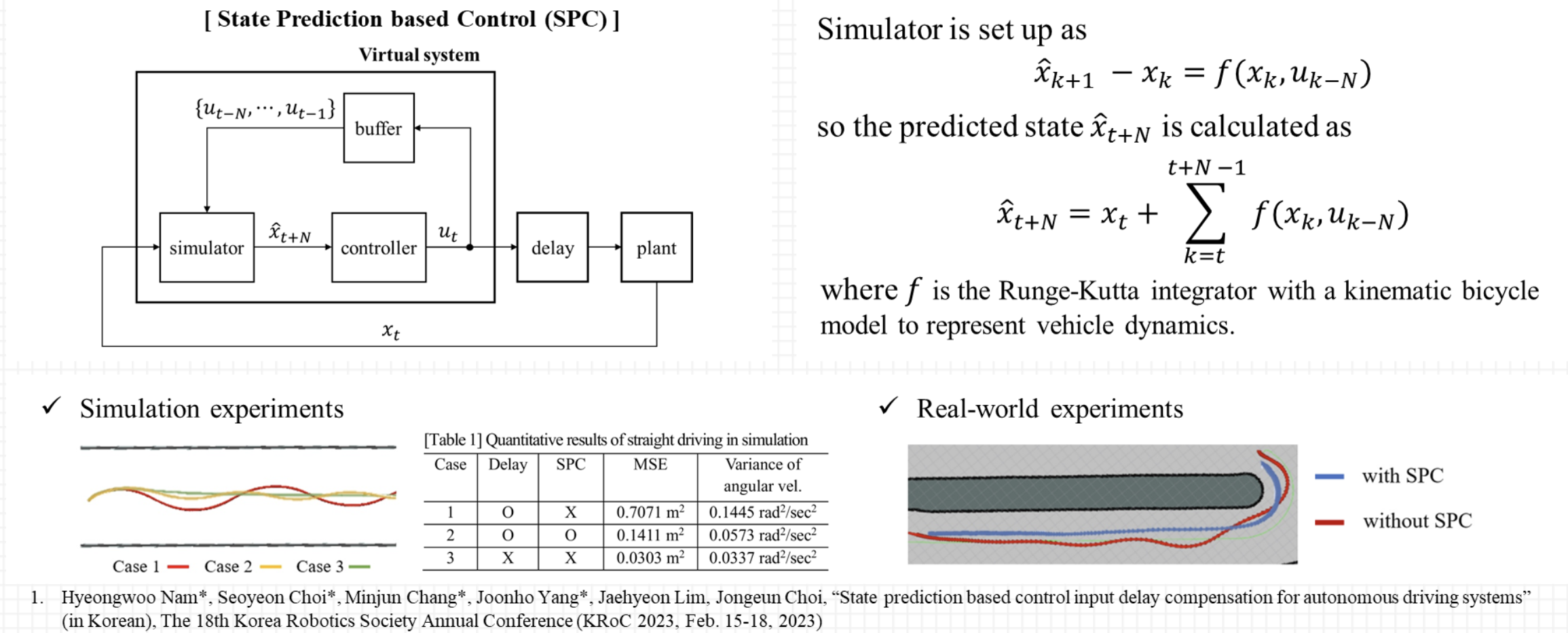

Nam, H.*, Choi, S.*, Chang, M.*, Yang, J.*, Lim, J., and Choi, J. (2023) “State Prediction based Control Input Delay Compensation for Autonomous Driving Systems.” The 18th Korea Robotics Society Annual Conference (KRoC). *equal contribution.
Chang, M., Choi, G., Byun, J., and Kim, D. (2024) “Eye Tuner: Media Literacy Program based on Pupil Tracking.” C-2024-039138 Registered.
Chang, M., Kim, W., Park, H., Cho, M., and Kim, H. (2024) “AUTONOMOUS DRIVING AUXILIARY CART ROBOT FOR ASSEMBLY PROCESS.” KR 10-2024-0177135 (under prosecution).
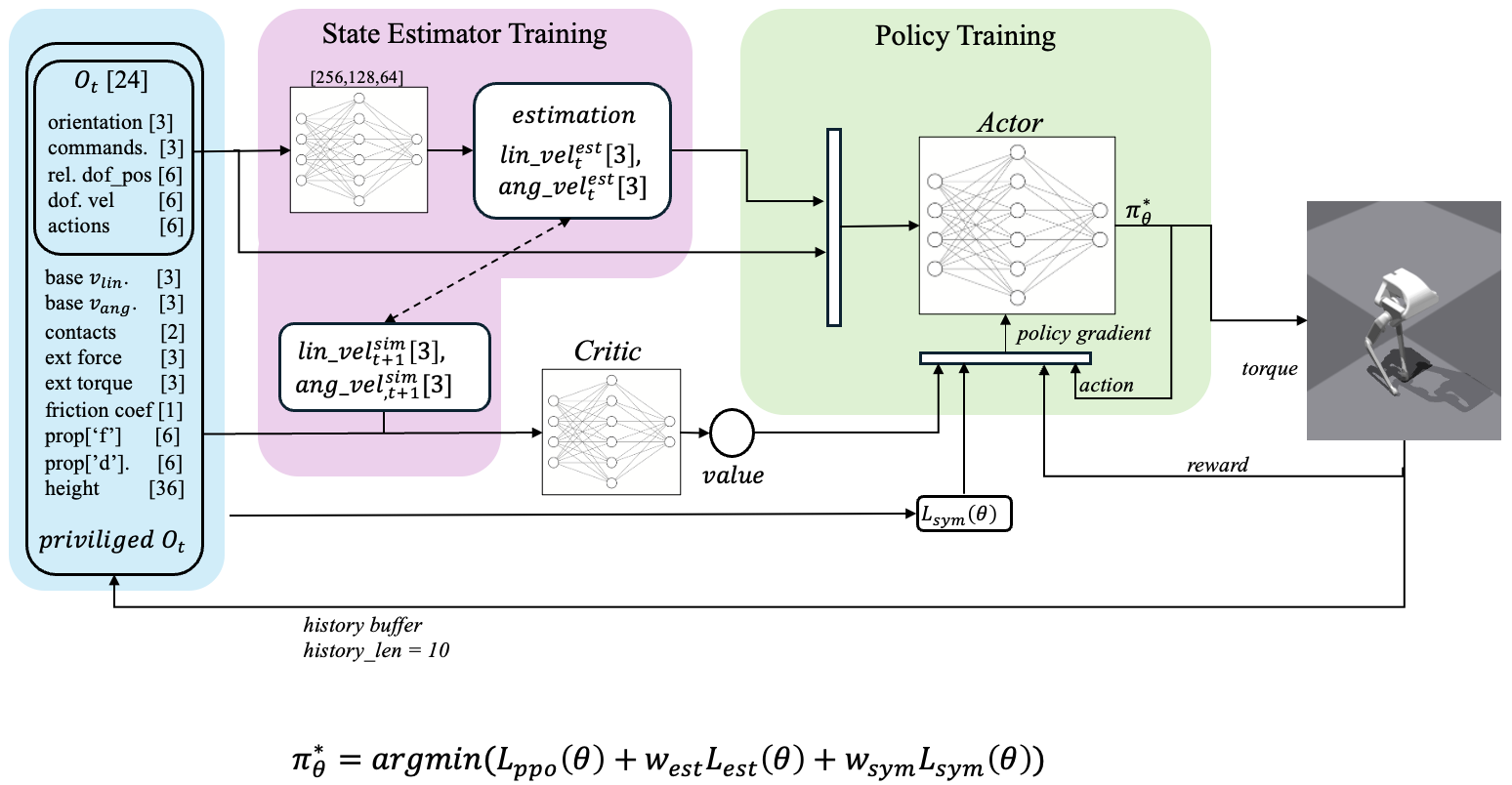
Chang, M., Shin, J., and Park, J. (2025) “Robust Symmetric Bipedal Locomotion Development via Simultaneous State Estimator Neural Network Training.” The 20th Korea Robotics Society Annual Conference (KRoC), Poster Presentation.
Baek, F., Chang, M., and Kim, E. (2026) “Large Language Models as Virtual Personas to Estimate Construction Practitioners’ Perceptions of Robotic Automation.” ASCE International Conference on Computing in Civil Engineering (i3CE), Songdo, Korea.
Chang, M., Cho, E., Jeon, J., Park, G., and Kim, Y. (2020) “Automatic-Continuous Urine Output & Urinanalysis System: ACUOUS.” KR 10-2944428-00-00, Registered.
Kim, S., Chang, M., Machiraju, S., and Cho, Y. (2026) “A Perception-to-Decision Vehicle Monitoring System for Highway Work-Zone Safety.” ASCE International Conference on Computing in Civil Engineering (i3CE), Songdo, Korea.
Chang, M., Machiraju, S., Baek, F., and Cho, Y. (2026) “Real-Time Temporal Convolution based Worker Motion Recognition with Three IMU Sensor Combinations.” 43rd International Symposium on Automation and Robotics in Construction (ISARC), Singapore.
Chang, M., Machiraju, S., and Cho, Y. (2026) “Field Evaluation of a Wearable Framework for Worker Motion Recognition and Zone-Level Localization.” 43rd International Symposium on Automation and Robotics in Construction (ISARC), Singapore.