Bipedal Locomotion
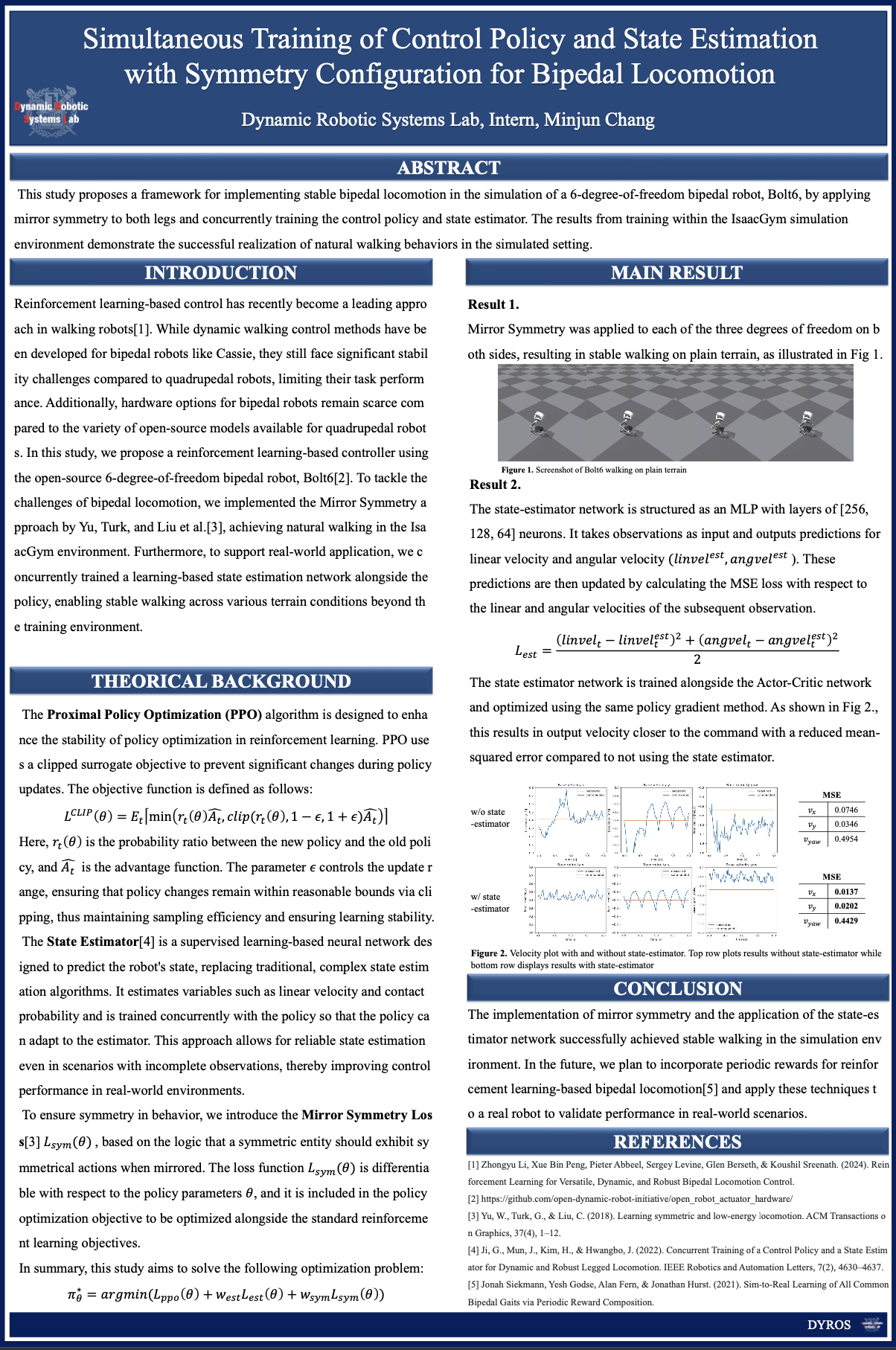
I worked on reinforcement-learning-based bipedal robot locomotion with the Bolt10 model. The main task is to learn a robust policy that transfers well to the real world. A state-estimator MLP is concurrently trained to perform adaptive locomotion on unfamiliar terrain. The framework is shown below.
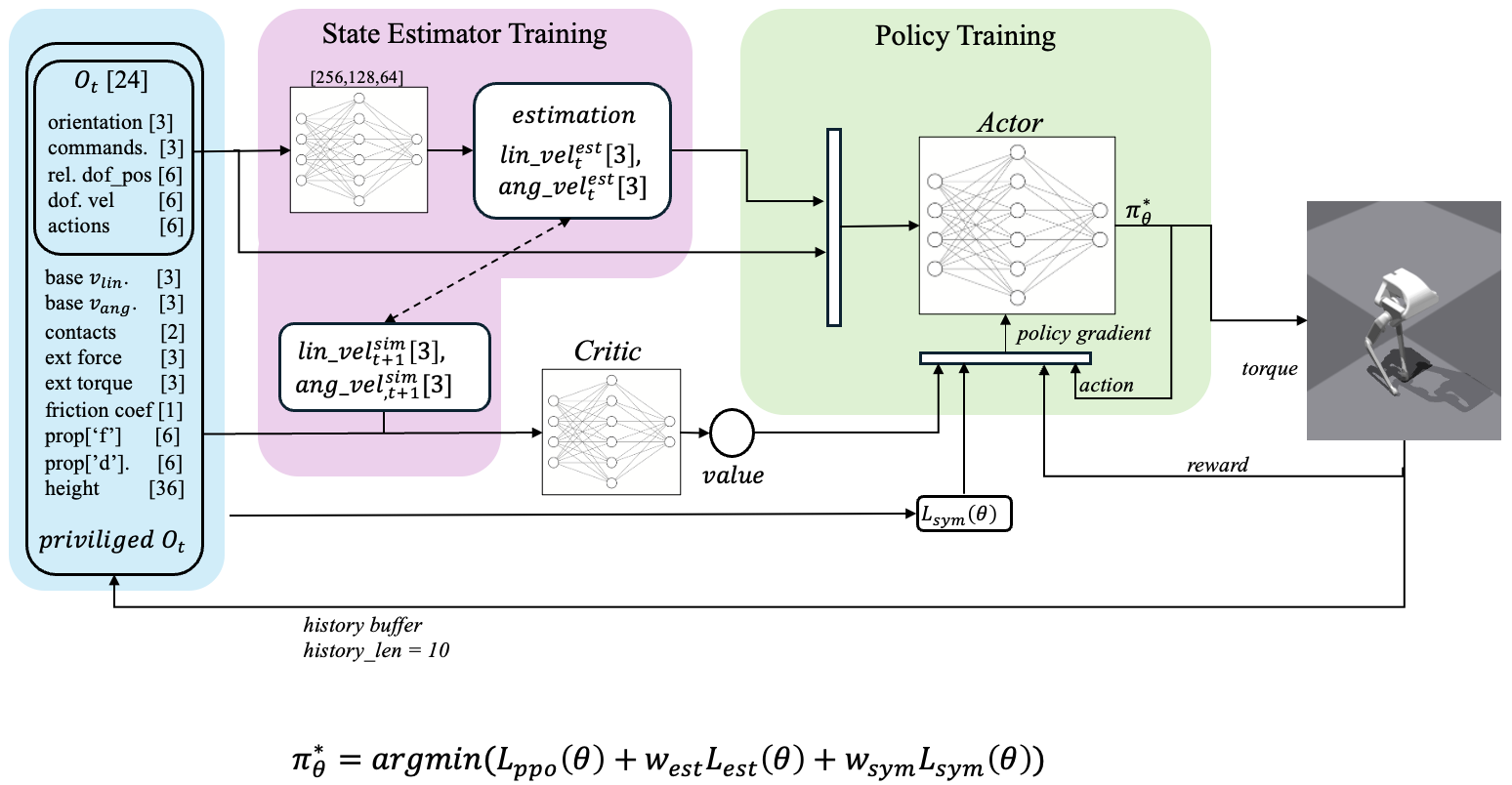
Simulation and training are conducted in IsaacGym (NVIDIA, CUDA 12.2) using the rsl-rl RL framework. Sim-to-sim verification is done in MuJoCo. Simultaneous training of the state estimator has shown improvements in sim-to-sim transfer. I intend to deploy the trained policy on a real Bolt6 robot.
Walking in IsaacGym
Walking in MuJoCo
Other motions developed during training
Crouched walking 
Swing walking 
Poster presentation at SNU GSCST (2024.08.29)