
Autonomous Driving
Autonomous Robot Racing Competition
I participated in this competition with Yonsei Univ. as a member of the localization team.
My role (localization): I developed a pre-localization package that fuses orientation and position data from two IMUs and a GPS sensor. I also contributed to a state-prediction-based control-input delay compensation method.
State-Prediction-based Control Input Delay Compensation for Autonomous Driving Systems 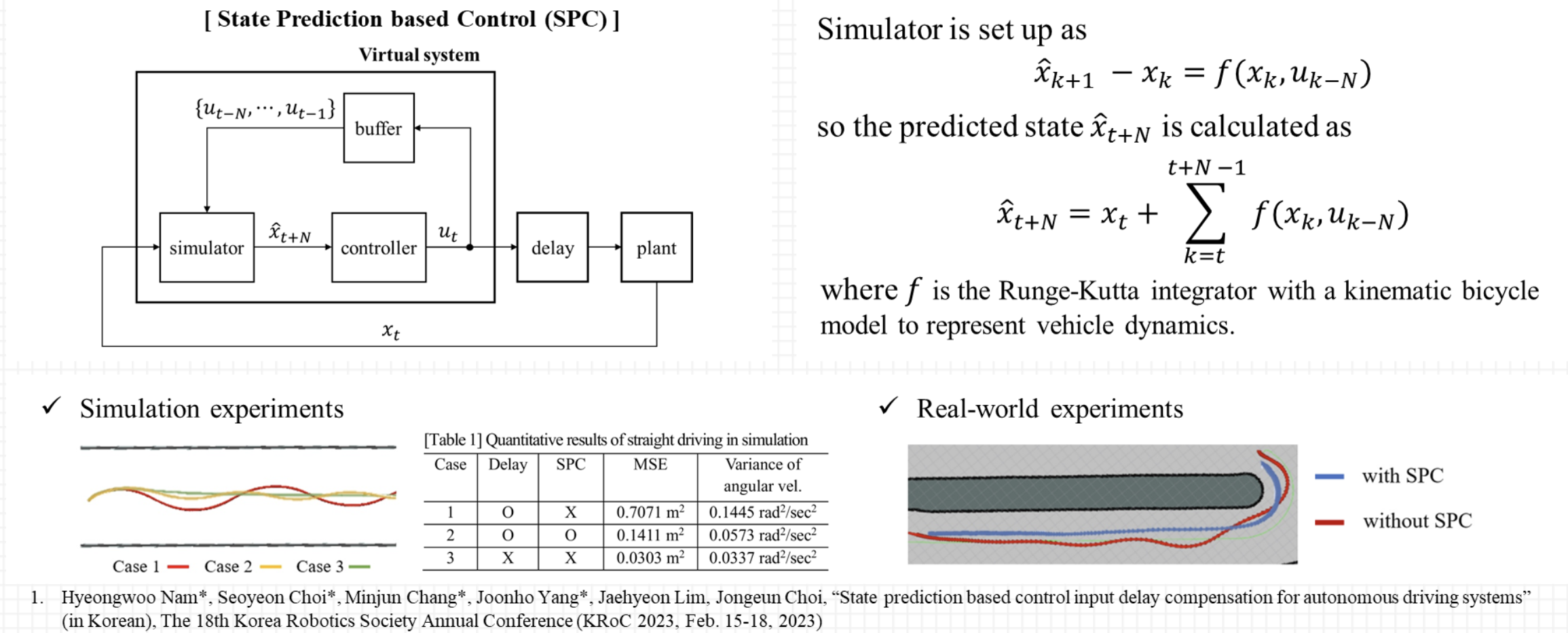
Publication: Hyeongwoo Nam, Seoyeon Choi, Minjun Chang, Joonho Yang, Jaehyeon Lim, Jongeun Choi, “State prediction based control input delay compensation for autonomous driving systems,” KRoC 2023 (*equal contribution).
Award: 1st Place, Second Autonomous Robot Racing Competition, KROS, Nov 2022.

GoLe Robotics — WeRo3
I developed and implemented path-planning algorithms (A* and sMPC) for WeRo.

WeRo3 generates a global path from a pre-given “measurement drawing” and uses real-time sensor data to avoid collisions with debris.
Cartrasche
Cartrasche follows a worker by tracking a target marker.

I designed the actuator platform and took part in developing the autonomous driving system without motor velocity feedback. See the Making Robots page for more details.