Bipedal Locomotion
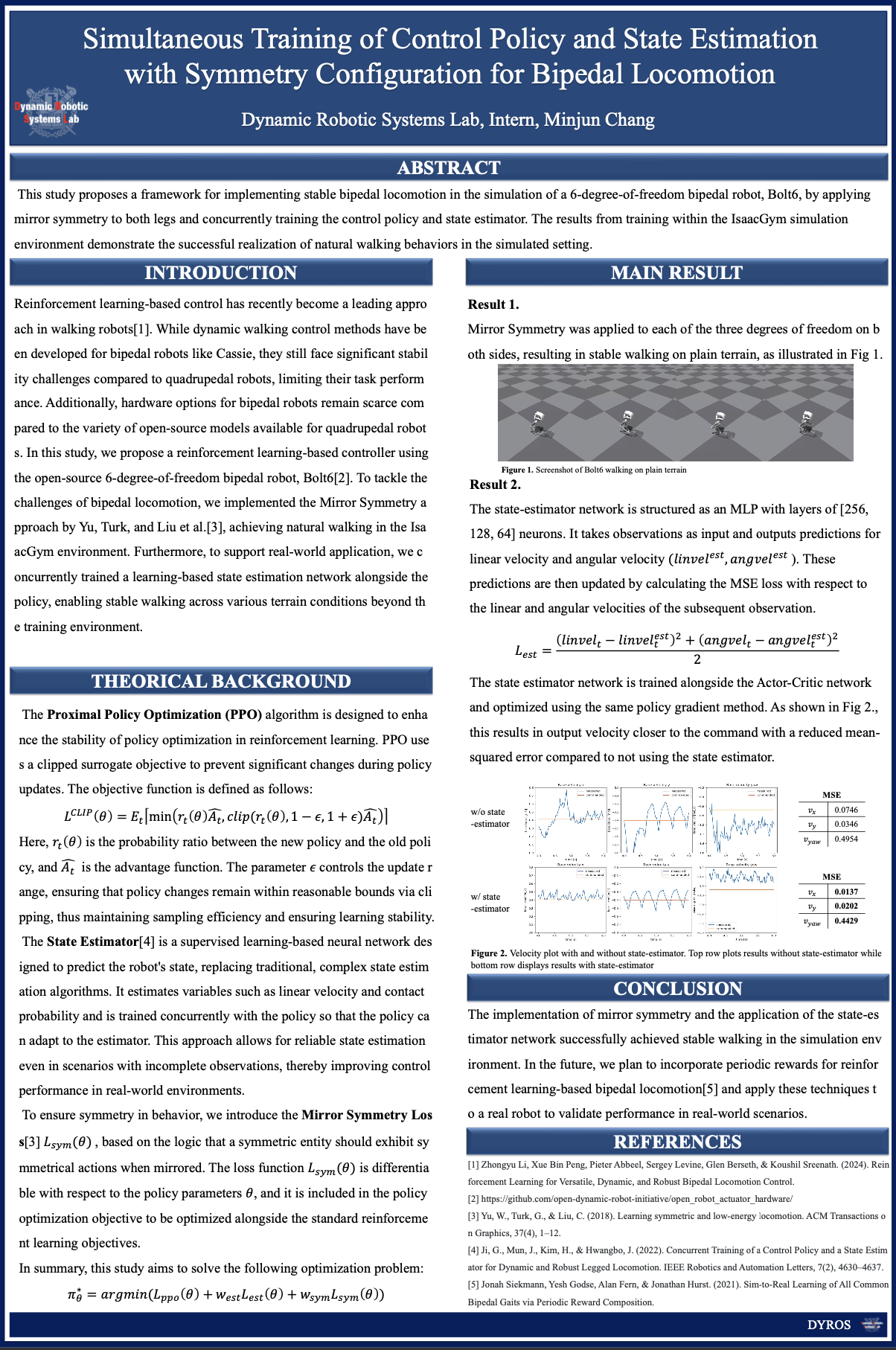
I worked on reinforcement learning based bipedal robot locomotion with Bolt10 model. Main task is to configure profound policy that applies well on real world robot. State-Estimator Multi Layer Perceptron was concurrently trained to perform adaptive locomotion on alien terrains. The framework is as below.
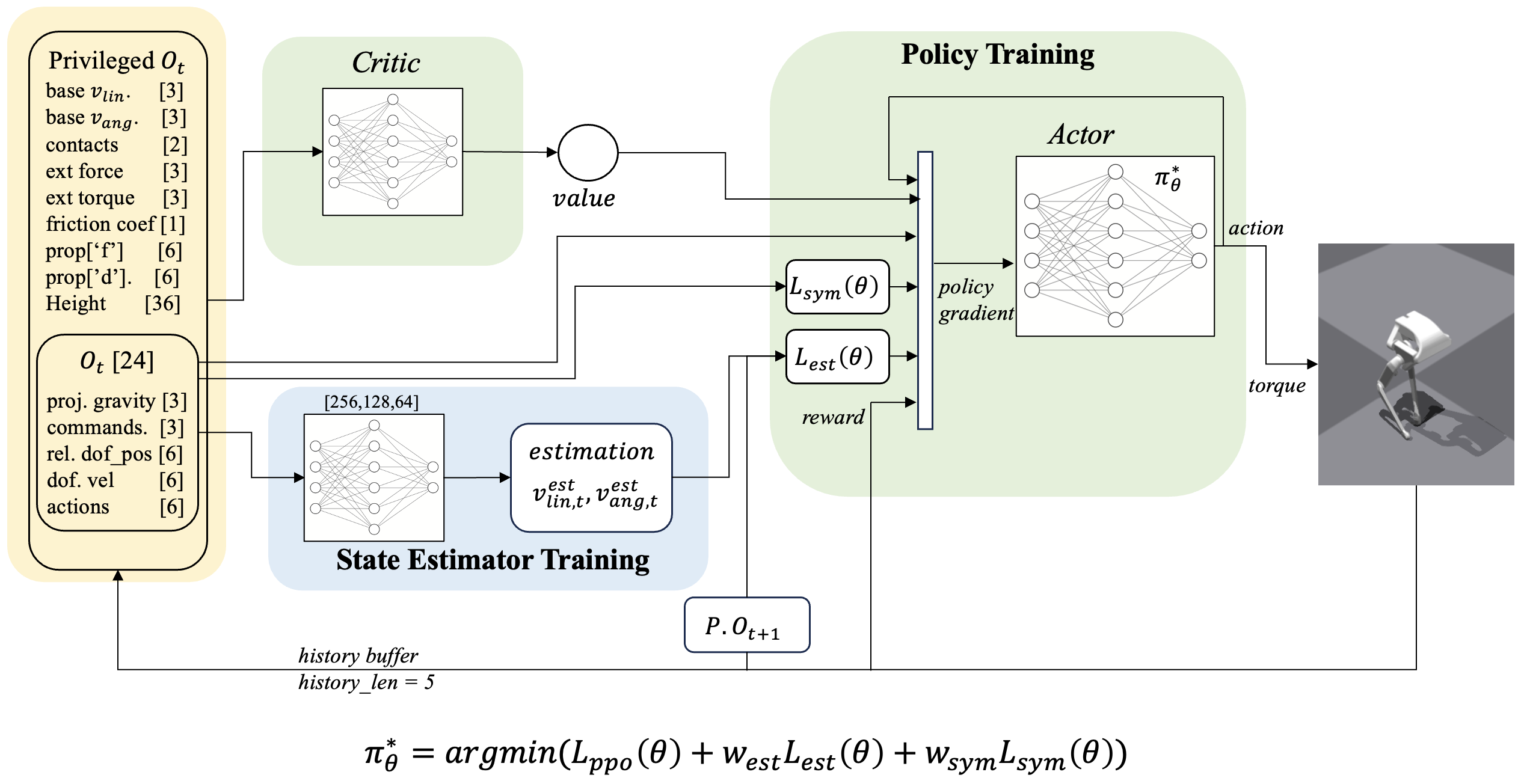
Simulation and learning is conducted on IsaacGym(NVIDIA) framework with cuda12.2. using RL framework rsl-rl. Sim2Sim vertification was done on MuJoCo. Simultaneous training of state estimator has shown improvements on Sim2Sim performance on policy training. I intend to implement trained policies on real Bolt6 robot.
Walking in IsaacGym Env
Walking in MuJoCo Env
Below are some other motions made during training
Crouched Walking
Swing Walking
Poster Presentation at SNU GSCST(2024.08.29)