
Autonomous Driving
Autonomous Robot Racing Competetion
I participated in Yonsei Univ. for the competition as a member of localization team.
Localization(my role) : developed pre-localization package that fuses orientation and position data from two different IMUs and a GPS sensor. Took part in State Prediction based control input delay compensations method development.
Publication
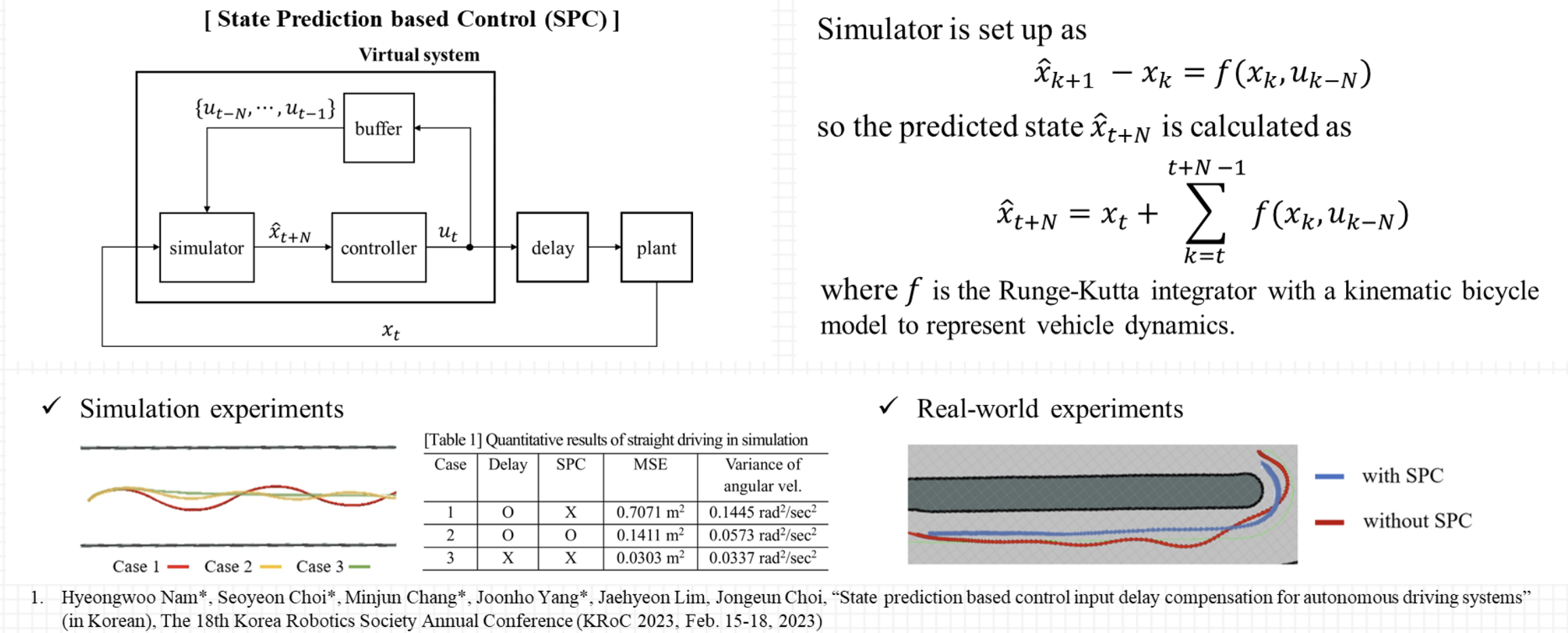
Hyeongwoo Nam, Seoyeon Choi, Minjun Chang, Joonho Yang, Jaehyeon Lim, Jongeun Choi, “State prediction based control input delay compensation for autonomous driving systems ”, The 18th Korea Robotics Society Annual Conference (KRoC 2023, Feb. 15-18, 2023) *equal contribution
Awards
Nov 2022 | 1st Place, Second Autonomous Robot Racing Competetion, KROS

GoLe Robotics ‘WeRo3’
I developed and implemented path planning algorithm(A* & sMPC) for WeRo.

WeRo3 generates global path to follow based on ready-given ‘measurement drawing’ and simultaneous sensor data to avoid colliding with rubbish.
Cartrasche
Cartrasche only follows worksman with target marker!
 I designed actuator platform and took part in developing the autonomous driving system without motor velocity feedback.
I designed actuator platform and took part in developing the autonomous driving system without motor velocity feedback.
Check out more about Cartrasche on Making Robots page!